Control Systems Part1-4a-时延影响和PID
时间延迟对系统频响的影响
时延是输入与控制系统开始响应输出之间的时间差,其被称为lag或者dead time,记作T或表示成$e^{-sT}$(拉普拉斯变换的时移性质:$L[f(t-t_0)]=F(s)e^{-st_0}$)
时延对频响相响图的影响
考虑一个系统函数为$G(s)$的一个系统,对其引入时间为T的时延,并求波德图
- 系统的幅频响应对应$|G(j\omega)|$,因此时延并不改变幅频响应。
- 但时间延迟从相频响应图中减去了$\omega T$,也就是说,随着频率增大,相位减少越大;换句话说,它削减了相位裕度。
如下图所示:
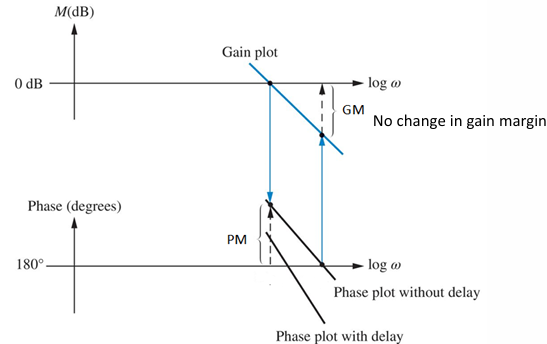
显然,如果时间延迟非常大,闭环系统将不稳定。
从时域的角度看
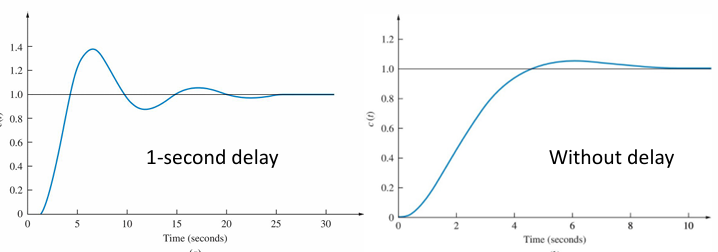
从时域的角度来看,延迟会造成(即,削减相位裕度会造成)
- 更低的阻尼比
- 更多的振荡响应
当系统内带有非最小相位元件(带有时滞特性/延时,相位滞后)元件时,会产生非最小相位系统。因此我们一般不单独讨论延迟,而是将其看做非最小相位系统来讨论。
非最小相位系统
什么是非最小相位系统
非最小相位系统(Nonminimum-Phase (NMP) Systems)是在复平面的右半平面(RHP)上具有零点,但系统仍旧稳定(极点还在左侧)的系统。由于根轨迹总是趋近并收敛于零点,因此当增益大到某一点,右半平面的零点有使系统极点趋向右半平面的趋势,可能造成系统不稳定。
(补充)反之,最小相位系统(Minimum-Phase (MP) Systems)就是s域右半平面没有零点或者极点的系统。最小相位系统无论何时都是稳定的。
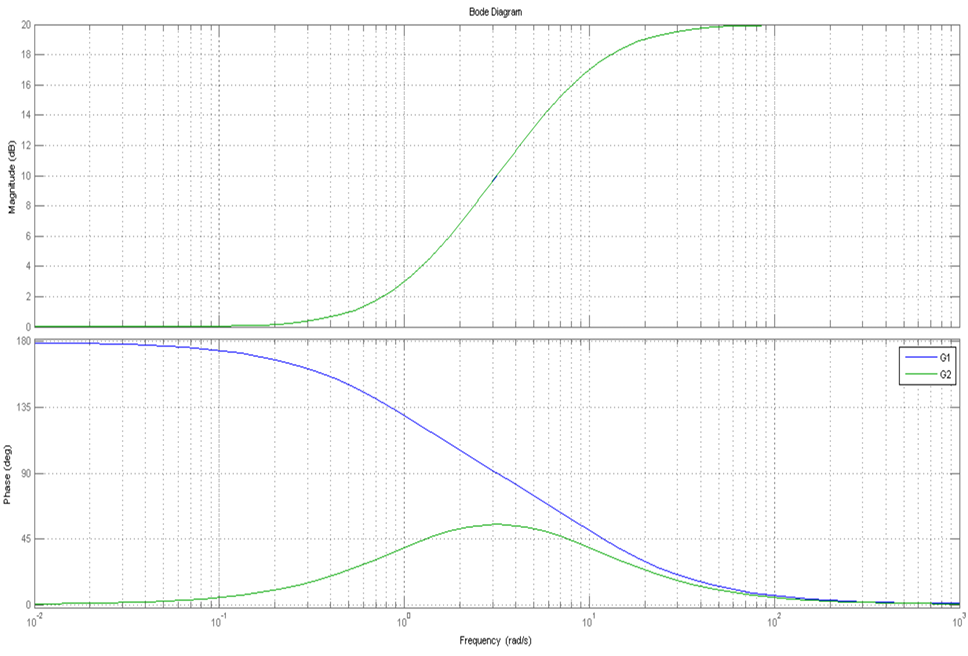
在具有相同幅值特性的系统中,对于大于零的任何频率,最小相位系统的相角总小于非最小相位系统;例如下图,是$G_1(s)=10\frac{s+1}{s+10}$(MP system)和$G_2(10\frac{s-1}{s+10})$(NMP system)的幅频图相频图。
从单位阶跃响应看最非小相位系统-负调
参考资料:自动化学报
一般情况下, 非最小相位系统对阶跃输入信号具有负调(Overshoot, 或称为下冲) 响应。下冲意味着阶跃输入的暂态响应一开始朝阶跃输 入的相反方向运动
下图展示了传递函数为$G(s)=\frac{(s-1)^2}{(s+1)^3}$的单位阶跃响应。
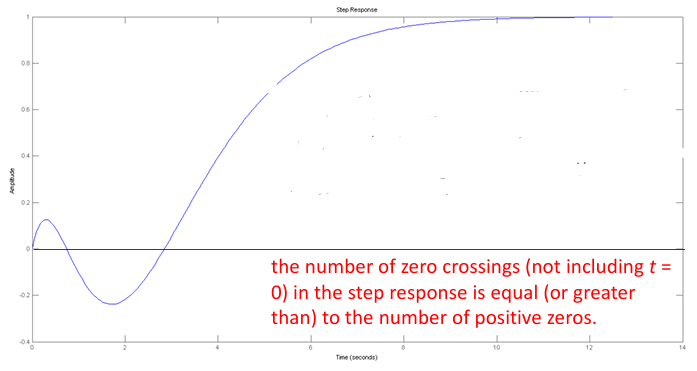
对于非最小相位系统而言,其单位阶跃响应穿过0的次数(不包含原点)大于或等于右半平面零点的个数。例如上图,右半平面零点有两个,都是1,因此穿越两次0。
但是,当一个线性非最小相位系统含有非实零点时, 其阶跃响应并非一定具有负调特性(可能还是有)。如传递函数$G(s)=\frac{s^2-s+4}{(s+3)^3}$描述的非最小相位系统对阶跃信号的响应就是单调的, 没有负调特性,如下图所示。
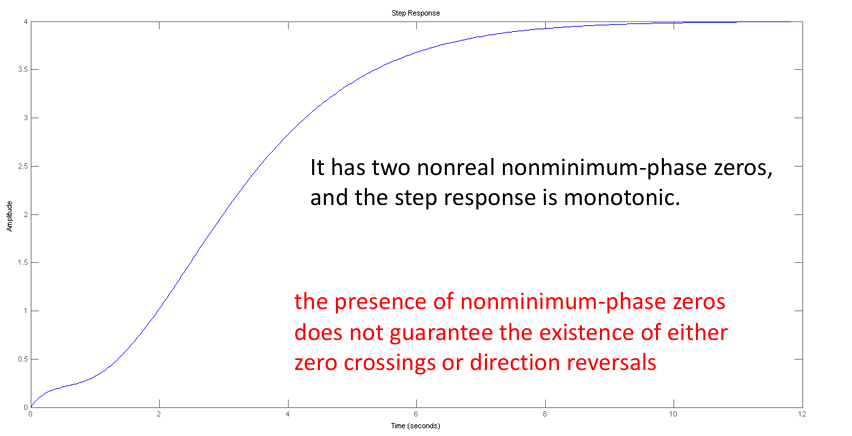
对于非线性非最小相位系统, 其阶跃响应一般具有负调特性,但因其种类繁多,无法用统一的定理 来判定其负调响应的类型。
PID控制器
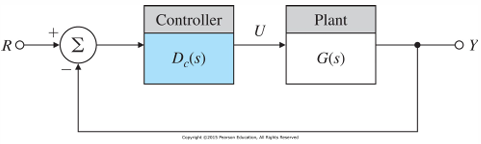
PID控制器是一种利用比例(Proportional)、积分(Integral)和微分(Derivative)三种动作来根据误差信号调节系统输入的反馈控制器。因为是调节系统输入,PID控制器一般作用于系统函数之前,和系统函数一起构成新的经过修补的前向传输函数。
PID控制器的通用式可以表达为(分别对应比例部分,积分部分,微分部分):
而所谓调PID,其实就是去调$K_p,K_i,K_d$这三个系数。下面会详细介绍
拆分研究
P控制器
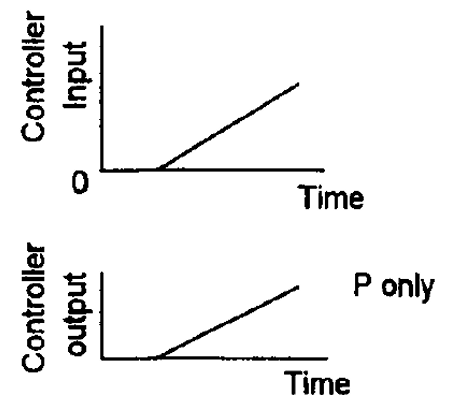
只保留P控制器的话,那就相当于给了一个增益,即$C(s)=K_P$,它和系统级联构成的就是$K_PG(s)$。单看这个控制器,它相当于把原来输入系统函数的$e$($e$是输入与当前输出的差)放大成了$K_Pe$。
下图展示了P控制器下,控制器的输入$e$和其对应的输出(即输入给$G(s)$的输入):
比例控制存在着一些不足——无法消除稳态误差。
假设系统$G(s)$自带稳态误差,那么对于单位阶跃信号(推导见CH1):
可以看到因为原系统$\lim_{s\rightarrow0}{G(s)}\neq\infty$,$K_p$只是减小了稳态误差,没有完全消除。
I控制器
I控制器就是积分的部分,其s域为$C(s)=\frac{K_i}{s}$。该控制器会将$e$进行积分,即控制器输出为$K_i\int edt$,如下图。

由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差。从数学推导的角度来解释一下:
假设系统$G(s)$自带稳态误差,那么对于单位阶跃信号
此时分母这个$s$会使得后面这一项趋于无穷,进而导致$e_{ss}=0$
D控制器
D控制器是微分的部分,其s域为$K_ds$,即该控制器会对误差进行微分,求出误差的变化速率:$de/dt$。下图展示了控制器输入与输出关系

微分控制器不会影响稳态误差,因为在稳态误差发生时,$e$已然达到稳定,误差随时间的变化率为零,因此微分控制器在此时并不起作用。
不同控制器多项结合
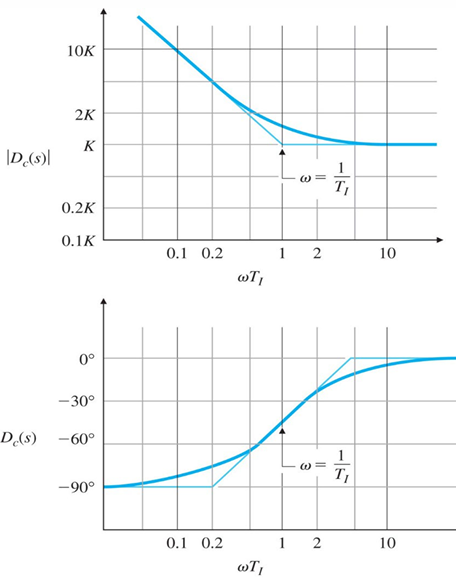
PI控制器
- P控制器只能减少不能消除稳态误差,而I控制器可以完全消除稳态误差。因此这二者结合的控制器稳态误差被I消除,没有稳态误差。
- 给系统的分母引入了一个$s$,削减了系统的高频(s很大)增益,而噪声通常是高频的,因此削减了噪声的影响
- 在分母引入$s$,相当于加快向量负半虚轴的增量;同时削减高频增益还使得幅度穿越频率变得更靠前。二者综合,即,减小了相位裕量。
控制器波特图如下:
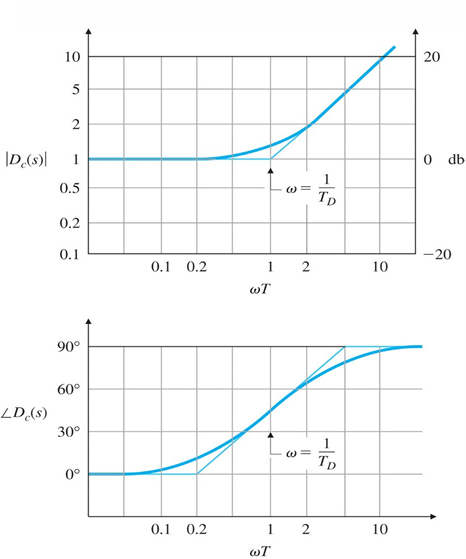
PD控制器
- 给分子引入一个s可以略微降低低频增益并提高高频增益。使得穿越频率靠后,增加相位裕量。
- 但是也增加噪声对系统的影响,因为噪声往往是高频的。
控制器波德图如下:
PID控制器
标准形式:
并联形式:
结合所有三种控制模式(比例、积分和微分),可以生产出没有稳态误差并减少振荡趋势的控制器。在后面Part2会介绍PID调谐原则,即如何调整$K_p,K_i,K_d$。