Control Systems Part1-1-控制系统概述及其基本分析
控制系统概述
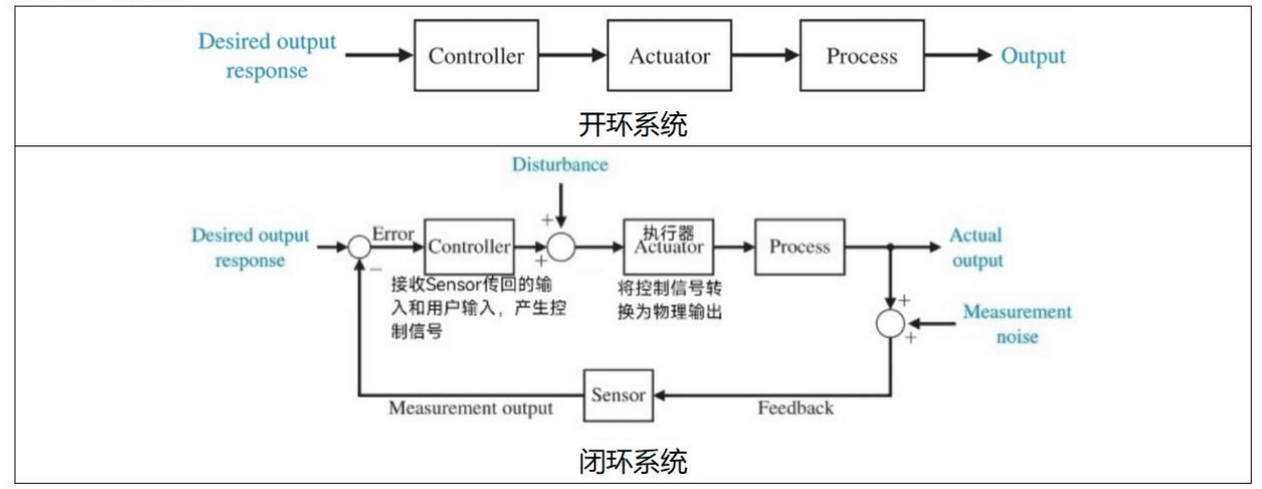
如上图所示,根据有无feedback,控制系统被分为开环控制系统和闭环控制系统两类。在一个抽象出的系统中,使用Sensor取回需要的数据,Controller处理数据并转换为控制信号,Actuator收到控制信号后将其转化为物理上的输出
这一门课仅涉及闭环线性时不变控制系统
开环控制系统
开环控制系统因为没有反馈的存在,因此系统的精度取决于校准的程度。
而且,开环控制系统无法消除收到的干扰或运行变化所造成的影响。
闭环控制系统
闭环控制系统将它现在的实际输出与期望的输出进行对比,再进行控制。这个过程被称为反馈。
通常来说,使用负反馈来控制一个系统。(i.e., 将系统期望的输出-现在的输出,得到error值)。在这门课中,只学习负反馈的情况。
对系统进行建模(引入)
使用拉普拉斯变换表达系统传输函数
一个带有反馈的系统,其系统可以用一个差分方程来描述。通式是:
通过变换将$y(t)$移动到一边之后,可以得到带有$x(t)$的和不带$x(t)$的两部分。带有$x(t)$的部分构成了系统的强迫响应(即,由外部激励引起的)。没有$x(t)$的部分是系统系统的自由响应。如下图

对这个系统函数进行拉普拉斯变换,$y(t)$和$x(t)$变换为$Y(s)$和$X(s)$。移项后即可传输函数$H(s)$
对于这个传输函数:
- 分子称为特征多项式(Characteristic Polynomial): 传输函数的分母
- 特征函数(Characteristic Equation): 让传输函数分母=0
- 极点:分母=0的解
- 零点:分子=0的解
系统的各项指标
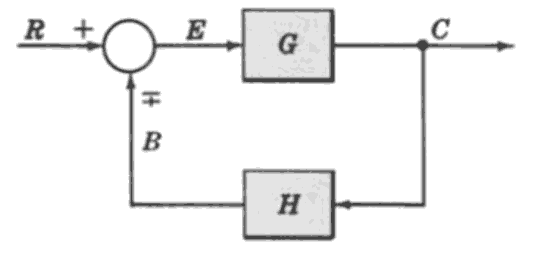
任何一个系统都可以被描述为上图的形式,其中:
- G:前向传输函数(Forward Transfer Function)
- H:反馈传输函数(Feedback Transfer Function)
- GH:开环传输函数(Open-loop transfer function)
- C/R:闭环传输函数(closed-loop transfer function)$\frac{C}{R}=\frac{𝐺}{1±𝐺𝐻}$;对于分母,正反馈是减,负反馈是加。
- E/R:误差比(Error ratio)$\frac{𝐸}{R}=\frac{1}{1±𝐺𝐻}$
- B/R:primary feedback ratio $\frac{𝐵}{𝑅}=\frac{𝐺𝐻}{1±𝐺𝐻}$
开环与闭环传输函数:
对于上图所示的这个系统,其闭环传输函数为$\frac{C}{R}=\frac{𝐺}{1±𝐺𝐻}$,其推导很简单,以负反馈系统为例:
研究闭环传递函数的原因很好理解:C(s)=R(s)H(s),可以轻易通过闭环传输函数得到系统输出
那什么是开环传递函数呢?其定义是:断开系统的主反馈通路,则前向通路传递函数$G(s)$与反馈通路传递函数$H(s)$的乘积称为系统的开环传递函数。因此,该系统的开环传递函数就是$GH(s)$
为什么需要开环传递函数呢?开环传递函数虽然没有直接的物理意义,但是其却包含了系统内所有的传输函数,因此可以从数学层面通过开环传递函数对系统的零极点、稳定性进行研究,且相较于闭环传递函数,减少了计算量。
开环传递函数是针对于闭环系统而言的,而不是指开环系统的传递函数
二阶系统传输函数的构成
对于任意一个二阶系统,其可以表示为
其中:
- $\zeta$称为阻尼比(damping ratio)。
- $\omega_n$称为无阻固有频率(damped natural frequency),其物理意义是在系统没有阻尼的时候,自然振荡的频率。
对这个系统求单位阶跃响应($u\left(t\right)\ $):
将该式因式分解后反拉普拉斯变化得到时域响应
其中$\omega_d=\omega_n{\sqrt{1-\zeta^2}}$,称为阻尼固有频率(damped natural frequency),是系统受阻时的角频率。
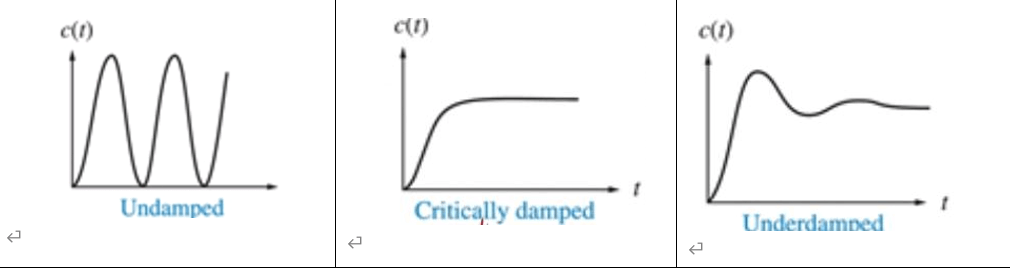
在$\zeta=0$时,称为无阻尼(undamped),系统持续振荡,系统极点位于虚轴上;
在$\zeta=1$时,称为严阻尼(Critically damped),系统不会出现振荡,而是直接逼近稳态值,极点位于左实轴;
在$0<\zeta<1$时,称为欠阻尼(underdamped), 系统在振荡后收敛于稳态值,极点位于s域左侧,有虚部分量。
如下面三图所示
瞬态响应的各项指标
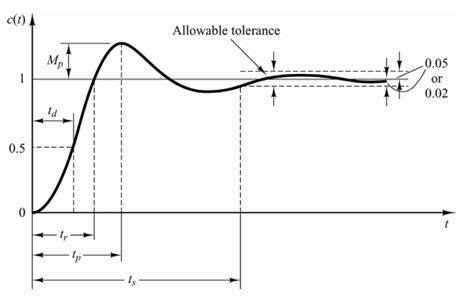
在这样的一个二阶系统响应中:
- Raise time $t_r$: 响应从10%-90% 或 0%-100% 所需的时间;
- Peak time $t_p$:响应到达最高峰值所需的时间;
- Maximum Overshoot $M_p$:$\frac{响应过冲-终值}{终值} $的比例;
- Settling time $t_s$:响应稳定至稳态值所需的时间,通常允许2%或5%的误差:(下式中T被称为时间常数,由瞬态响应的衰减速度决定,$T=\frac{1}{\zeta\omega_n}$。)
系统稳态分析
基于开环传递函数的系统的分类

对于G(s),如果其分母有单独的$s^N$,N为几它就是type N系统。例如没有单独的s只有(Ts+1),那就是type0系统;有s(Ts+1),就是type1系统
注意:系统的阶数(order)是指的分母内s的最高次,这里系统的类别(type)是指的孤立s的次数
系统的稳态误差
对于一个实际的控制系统,其稳态输出不可能在任何 情况下都与输入量一致或相当,也不可能在任何形式的扰 动作用下都能准确地恢复到原平衡位置。因此控制系统的稳态误差是一项重要的技术指标。
稳态误差的定义
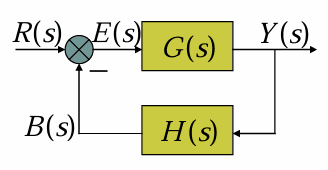
系统误差的定义:系统的输入$r(t)$和主反馈信号$b(t)$之差。
稳态及误差:当时间趋于无穷时的系统误差即为稳态误差,记为$e_{ss}$
只有当系统稳定时,研究稳态误差才有意义。
如何求稳态误差
对于任意一个系统,其开环传递函数为G(s)H(s),其中前向传递函数$G(s)$:
闭环传递函数是输出比输入得到的,因此有
根据上图,$B(s)$有:
而$E(s)$恰好等于$R(s)-B(s)$,因此:
而前面小节介绍的误差比就是:
现在已经有了$E(s)$的表达式,由终值定理,$\lim_{s\rightarrow0}sF(s)=\lim_{t\rightarrow\infty}f(t)$,也就是系统稳定的情况。因此:
只有稳定的系统,才可计算稳态误差。
不同type系统的稳态误差
为了更直观地简便举例解释,现考虑H(s)为1,即单位负反馈的情况。此时$G(s)H(s)=G(s)$,那么$\frac{1}{1+G(s)H(s)}R(s)$可以作如下推导:
也就是,这个式子变成了:(这个式子后面作为辅助解释)
unit step 输入下
输入信号u(t)的$U(s)=\frac{1}{s}$。此时:
记单位阶跃输入下的静止位置误差常数 (static position error constant)是$K_p$,等于开环传递函数$G(s)H(s)$的极限:
那么$e_{ss}$就可以由如下式子求到:
同时我们发现,对于G(s)没有孤立s在分母的函数(即type0系统),$e_{ss}=\frac{1}{1+K_p}$适用。但是一旦G(s)的分母存在孤立s,那么$K_p=G(0)=\infty$,$e_{ss}=0$;
这一点通过上面推出的$\frac{G(s)分母}{G(s)分母+G(s)分子}R(s)$也很好解释,G(s)分母存在s,且$s\rightarrow0$,因此$e_{ss}=0$
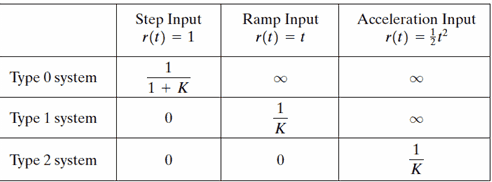
因此,对于系统输入单位阶跃响应,稳态误差有:
- type0系统的$e_{ss}=\frac{1}{1+K_p}$
- type1或更高type系统$e_{ss}=0$,$K_p=\lim_{s\rightarrow0}{G(s)H(s)}$
unit ramp 输入下
输入信号$r(t)$的$R(s)=\frac{1}{s^2}$,此时:
因此$s\rightarrow0$,分母$s+sG(s)H(s)$前面孤立的s可以直接当0对待,因此分母只剩下$sG(s)H(s)$
记单位斜坡输入下静止速度误差常数 (static velocity error constant)是$K_v$,等于$sG(s)H(s)$的极限:
此时$e_{ss}$
当G(s)分母没有孤立s(即,type0系统时),$K_v=sG(0)=0$
使用$\frac{G(s)分母}{G(s)分母+G(s)分子}R(s)$也很好解释,$R(s)=\frac{1}{s^2}$,$G(s)分母$未能对其引入的s进行消除,分母带趋近于0的s,因此$e_{ss}=\infty$
同理可得,当type1系统时,$e_{ss}=\frac{1}{K_v}$,type2及以上系统$e_{ss}=0$
因此,对于系统输入单位斜坡响应,稳态误差有:
- type0系统$e_{ss}=\infty$
- type1系统$e_{ss}=\frac{1}{K_v},K_v=\lim_{s\rightarrow0}{sG(s)H(s)}$
- type2或更高type系统$e_{ss}=0$
PPT还介绍了unit-parapolic input和它的$K_a$推导思路和前面一致。后面没怎么用,这里就省略了
总览
劳斯-赫尔维茨(Routh–Hurwitz)稳定性准则
Routh-Hurwitz 稳定性准则是对控制系统稳定性的一种数学检验,是线性时间不变 (LTI) 控制系统稳定性的必要和充分条件。
在信号与系统中学过,系统特征方程(传输函数的分母=0)解出来的特征根有:
- 完全在左半平面时,系统stable
- 在虚轴上时,系统critical stable(保持频率振幅不变的震荡)
- 出现在右半平面时,系统unstable
在系统阶数较少时,我们可以利用因式分解将分母拆开,来求得极点。也可以很轻易地用部分分式展开法来求逆变换,观察其时域区域在$t\rightarrow\infty$是否收敛。
但是,当遇到阶数非常非常高的系统时怎么办呢?有没有什么办法无需进行因式分解,就可以看出有没有极点出现在右半平面的方法?这就是Routh-Hurwitz 稳定性判据在干的事儿。
Routh-Hurwitz判据
引入
如果一个特征方程里面的所有项,有一项出现了与其他不同的符号,例如下面这个
此时可以立马判定这个系统是不稳定的,因为它一定会拆分出一个$(s-C)$(C是任意正常数项)的项目,来凑这个负号。
但是当符号全部相同时,就无法判定了。因为这种情况下可能会节出来实部为正,含有虚数的特征根。(无论是正负号,若全负号可以把它提一个-1出来放在传输函数分子,变成正号)。例如下面这个例子
因此我们必须使用其他更复杂的代数手段来判定,简单地观察符号是行不通的。
Routh 矩阵
Routh矩阵定义了一种填写矩阵的方法,可以通过观察矩阵的第一列来看出是否有右半平面的根
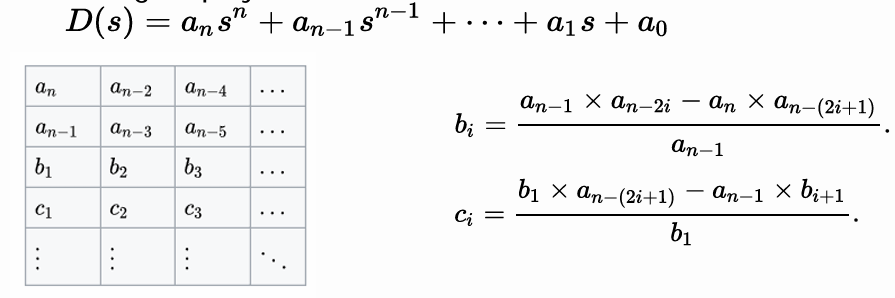
首先,假设特征函数是:
因为特征函数有6阶,因此有7列。
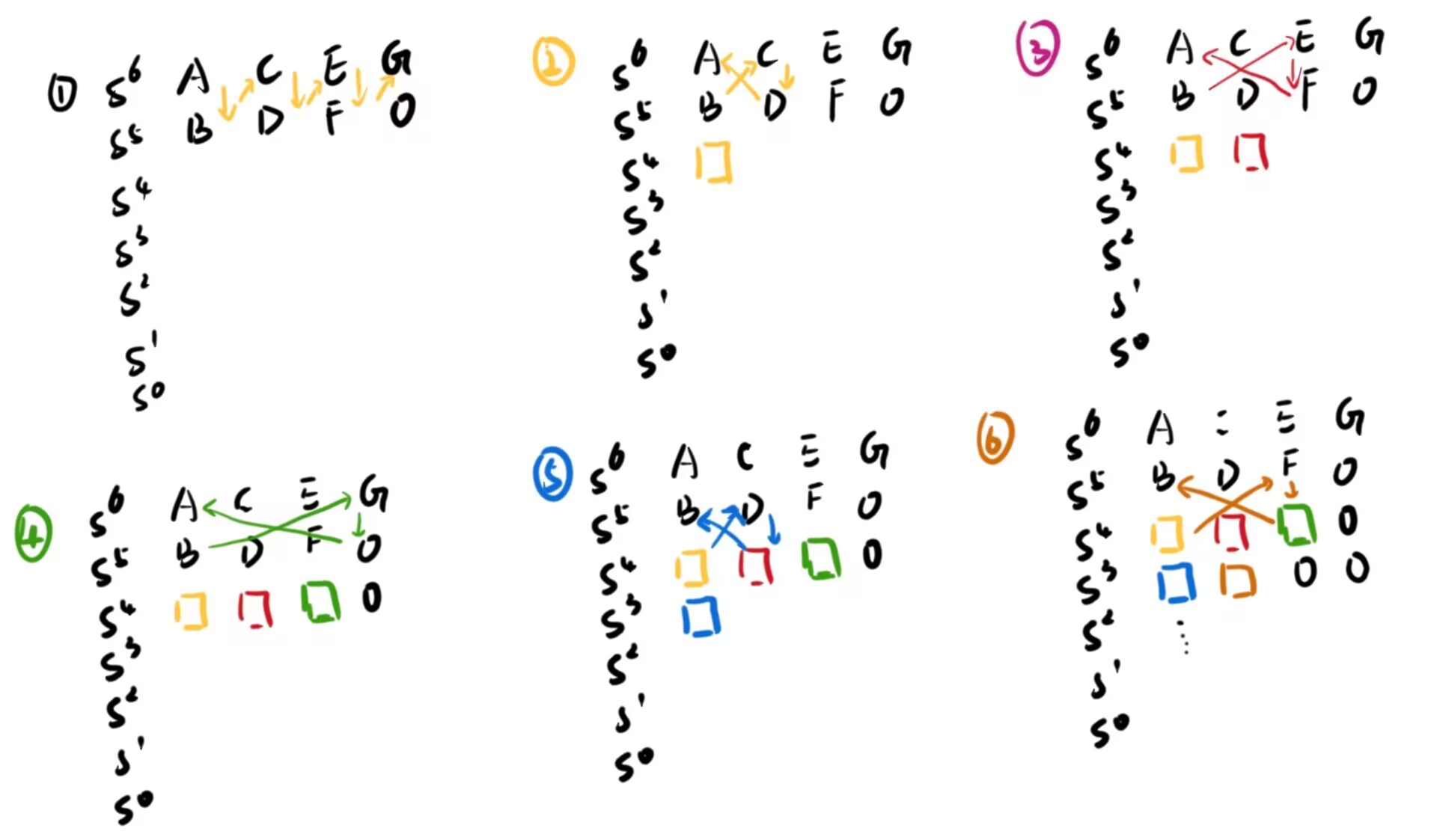
- 首先将ABCDEFG按照上图第一步填入矩阵
- 使用$\frac{BC-DA}{B}$算出黄色格子,如上图第二步
- 使用$\frac{BE-FA}{B}$算出红色格子,如上图第三步
- 使用$\frac{BG-0\times A}{B}$算出绿色格子,如上图第四步;此时到达了末尾,因此绿色格子后面填0,换行
- 使用$\frac{黄\times D-红\times B}{黄}$算出蓝色格子,如上图第五步
- 使用$\frac{黄\times F-绿\times B}{黄}$算出棕色格子,如上图第六步;此时棕色格子后面,绿色格子下面按照这个规则算出来等于0,因此换行;
- 保持这个规则,一直算到全部为0的一行,舍弃掉该行,剩下的就是Routh矩阵
通式可以写为:
稳定性判定
- 当Routh矩阵的第一列全部是正数时,系统稳定
- Routh矩阵的第一列有几次符号变化,就有几个右边平面的根
举个例子
沿用前面例子的系统传输函数:
首先,转写为Routh矩阵,上式特征方程为$s^4+2s^3+3s^2+10s+8$。按照下图展示的步骤进行转写
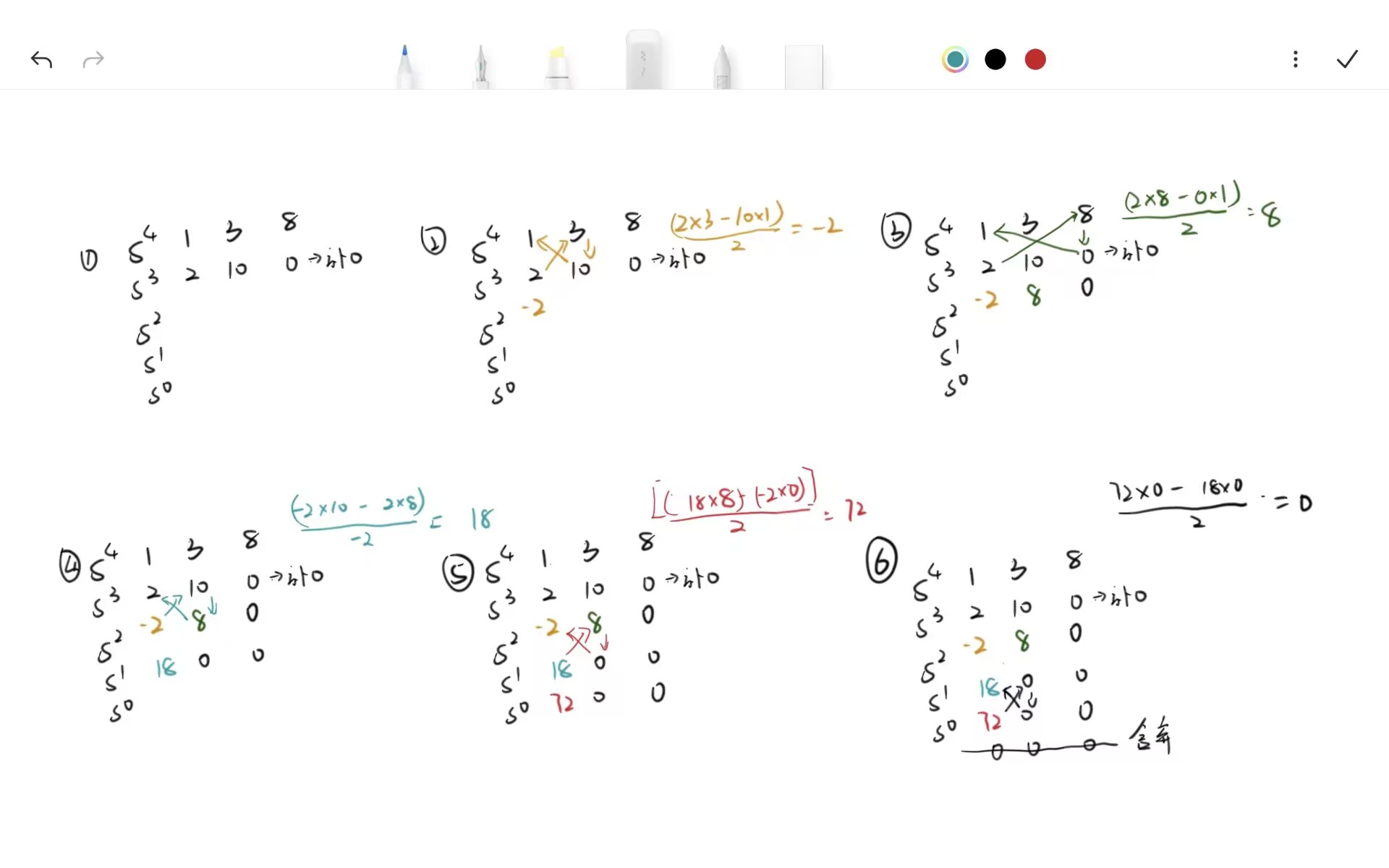
在Routh矩阵中,第一列经历了从2到-2 和 从-2到18 两次符号变换。因此:系统不稳定,有两个位于右侧的根