Control-Systems-Part2-Lectrue4-根轨迹
引入
我们在研究系统极点的路径时,都是对闭环传递函数而言的。因为闭环传递函数的零极点可以直接反应系统的一些特性,例如稳定性,收敛速度,是否存在过冲等等。
考虑下图这样的一个系统,其系统闭环传递函数为$\frac{KG(s)}{1+KG(s)H(s)}$。我们研究的就是$1+KG(s)H(s)=0$时产生的极点。但是,我们的分析对象其实是$G(s)H(s)$这个开环传递函数,我们是通过分析OLTF,来研究CLTF的根。
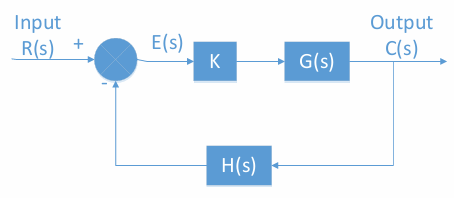
而所谓根轨迹,就是随着增益K的变换,CLTF极点的移动路径。而这个轨迹可以通过CLTF,即$G(s)H(s)$的极点和零点绘制出来。
根轨迹的基本特性
Dr.Huda PPT上的规则比较基础,但下一章会用到超出这个范围外的知识。这个视频讲了更普适的规则【自动控制原理】8_根轨迹_Part2_根轨迹手绘技巧_哔哩哔哩_bilibili。下面的笔记是结合二者写的
根轨迹的数种规则
规则1:系统的根轨迹条数等于系统极点个数或零点个数(取最大的那个)
例如$G(s)=\frac{(s+4)(s+1)}{(s+3)(s+0.5)}$,系统有2个零点2个极点,Max(2,2)=2,因此系统有两条根轨迹
规则2:根轨迹总是从OLTF的极点移动到OLTF的零点
我们先来研究一下系统的特征方程。为了简化举例,这里考虑单位反馈系统,其传递函数是:
其特征方程是:
其中,$G(s)$称为Loop gain($KG(s)$才是OLTF),其可以拆分为分子和分母部分:$G(s)=\frac{M(s)}{D(s)}$,特征方程为
改写一下就是:
前面提到,根轨迹是$K=0\to\infty$。当$K=0$时,特征方程的是$D(s)=0$,因此是OLTF的极点;当$K=\infty$时,特征方程是$N(s)=0$,因此是OLTF的零点。
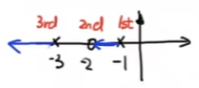
规则3:实轴上的根轨迹存在于从右向左数,OLTF的奇数个极点或零点的左侧。
如下图所示。需要注意的是,只在实轴上有这个规则。

规则4:如果复数根存在,则其一定是共轭的,即沿着实轴对称
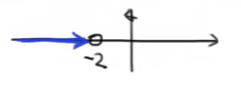
规则5:若极点和零点的个数不足以让它们成对,则会孤立的根轨迹会指向无穷或从无穷来
- 对极点而言,它将指向无穷。如下图
- 对零点而言,将从无穷指向它。如下图
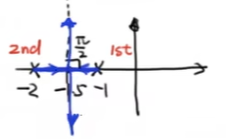
规则6:根轨迹沿渐近线移动。渐近线求法如下
记极点个数为n,零点个数为m。渐近线与实轴的交点是:
渐近线与实轴的夹角是:
举个例子:对于$\frac{1}{(s+1)(s+2)}$
如下图
规则7:两条根轨迹永不相交
规则8:如果至少有两条根轨迹指向无穷,则所有根的合是一个常数
汇总:
规则1:系统的根轨迹条数等于系统极点个数或零点个数(取最大的那个)
规则2:根轨迹总是从OLTF的极点移动到OLTF的零点
规则3:实轴上的根轨迹存在于从右向左数,OLTF的奇数个极点或零点的左侧。
规则4:如果复数根存在,则其一定是共轭的,即沿着实轴对称
规则5:若极点和零点的个数不足以让它们成对,则会孤立的根轨迹会指向无穷或从无穷来(极点无穷去,零点无穷来)
规则6:根轨迹沿渐近线移动,渐近线与实轴交点:$\sigma=\frac{极点的和-零点的和}{n-m}$,与实轴角度:$\theta=\frac{2q+1}{n-m}\pi,q=0,1,…,n-m-1$。(其中n为极点个数,m为零点个数)
规则7:两条根轨迹永不相交
规则8:如果至少有两条根轨迹指向无穷,则所有根的合是一个常数
从特征函数的角度理解根
这里的东西会在下一章设计补偿器用到
特征方程对OLTF提出的要求
回看特征方程:
$KG(z)$为系统OLTF,如果将其记为$F(Z)$,则有:
这就要求复数$F(z)$满足:
$F(z)$的模长和角度
对于任意的$F(z)$,其可以被拆分为多个复数相乘,例如如下例子
此时$|F(z)|$和$\angle F(z)$可以表示为:
Breakaway 和 Breakin ponit 的计算
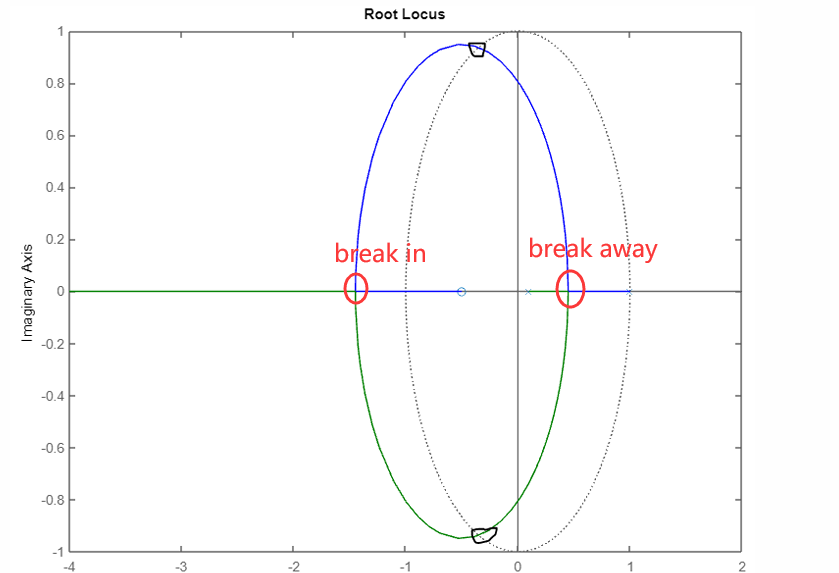
根轨迹相离的地方叫做Breakaway Point, 重新相交的地方叫做Breakin Point。如下图所示
如果将OLTF$F(z)$拆分为分子分母的形式,特征方程可以写为:
对k求导:($上导下不导-下导上不不导/分母^2$)
让$-\frac{D’(z)N-N’(z)D(z)}{N^2(z)}=0$,解出来的z就是breakout 和 breakin point
举个例子,对于系统函数$G(z)=\frac{(z+0.5)}{(z-1)(z-0.1)}$
令$-\frac{z^2+z-0.65}{(z+0.5)^2}=0$,即$z^2+z-0.65=0$,解出来$z_1=0.4487,z_2=-1.4487$。由于原loop gain的极点分别在1和0.1,而零点在-0.5,因此靠左的$z_2$是Break in point,$z_1$是Break out。它对应的图像就是这一小节开头的那张图。
从根的角度研究采样周期T对系统的影响
T对系统稳定性的影响
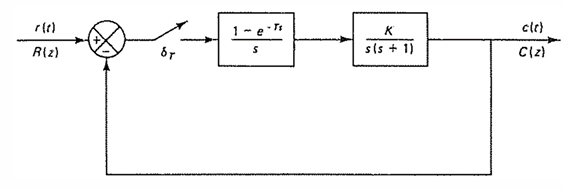
考虑下图含ZOH的系统
- T=1s时,解出poles:1,0.3678;zeros:-0.7181
- T=2s时,解出poles:1,0.1353;zeros:0
- T=2s时,解出poles:1,0.0183;zeros:0.301
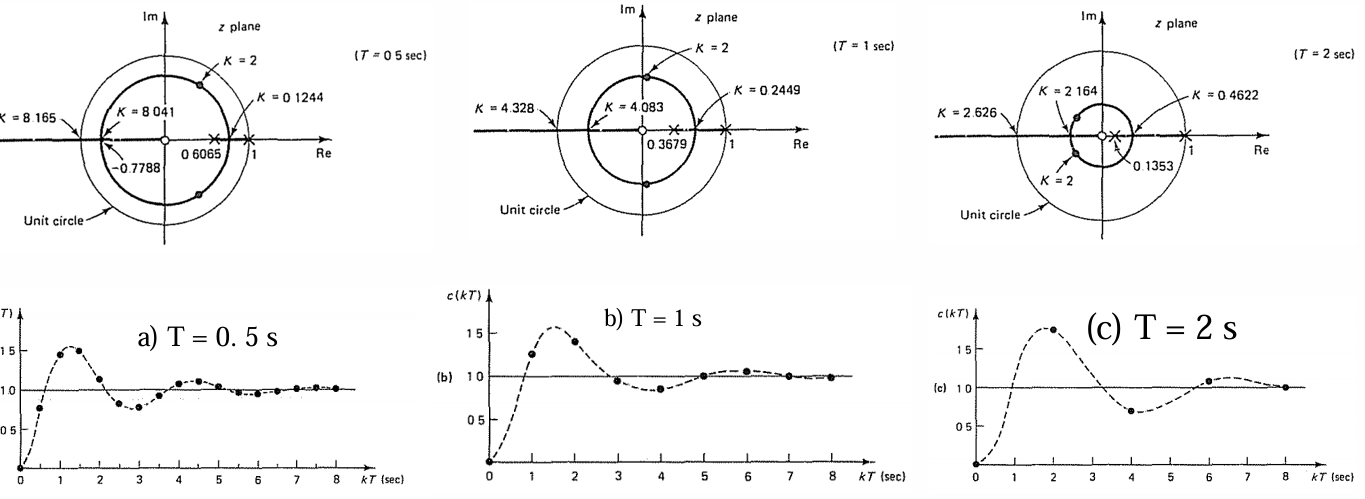
分别代入三个T,使用$\frac{dK}{dz}=-\frac{D’(z)N-N’(z)D(z)}{N^2(z)}=0$解出三个T下的break in 和 Break out point。画出根轨迹,如下:

可以看到,T=1时根轨迹出单位圆的K=2.3925;T=2时出单位圆的K=1.4557;T=4时出单位圆的K=0.9653。因此,采样周期大,系统稳定性越差。
经验法则是:
- 如果闭环系统欠阻尼,则单位震荡周期内进行 8 到 10 次采样。
- 如果闭环系统过阻尼,在阶跃响应的上升时间内采样 8 到 10 次
T对系统瞬态响应的影响
我们在前面介绍过,在z域下,根越靠近$\pm 180^\circ$,单位阶跃响应的震荡频率越;根越靠近单位圆,瞬态响应收敛越慢。
观察下图的根轨迹,对于更大的T,break in point会来得更快,走出单位圆的K也会更小,即根会越快到180度,同时收敛也更慢。体现在瞬态响应上就如下图
T对系统稳态误差的影响
考虑下图系统
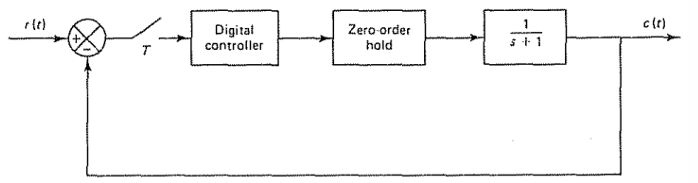
$G_{ZA}$的求法前面已经演示很多,这里不再赘述。系统特征方程为:
考虑unit ramp input下的稳态误差$k_v$。代入前面介绍的公式:
- T=0.5s时,$GH(z)=\frac{0.3935Kz}{(z-1(z-0.6065))}$
代入算出$K_v=4$,$e_{ss}=\frac{1}{K_v}=0.25$
- T=1s时,$GH(z)=\frac{0.6321Kz}{(z-1(z-0.3679))}$
代入算出$K_v=2$,$e_{ss}=\frac{1}{K_v}=0.5$
- T=2s时,$GH(z)=\frac{0.8647Kz}{(z-1(z-0.1353))}$
代入算出$K_v=1$,$e_{ss}=\frac{1}{K_v}=1$
由此可见,T越大,系统的稳态误差越大