Control-Systems-Part2-Lectrue1~3-数字控制系统基础
数字控制系统简介
数字控制系统的核心是使用MCU、电脑之类的控制器通过软件的形式对数据进行处理。而不是模拟信号那样通过模拟器件来构成积分器微分器等等。
数字控制系统具有如下优点:
- 对噪声的鲁棒性好:数字信号可以无损传输,只要不超过门限值,数字信号读取出来都是无损的。
- 灵活性高:数字控制系统主要通过软件编程来实现对数据的处理,这样的系统灵活性高,重新刷写程序即可设计新的系统
- 成本:数字系统的可靠性在升高而成本在下降
- 易用性:大规模集成电路可以更轻易地集成数字IC,这对数字信号处理更加友好
数字控制系统的基础-ADC和DAC
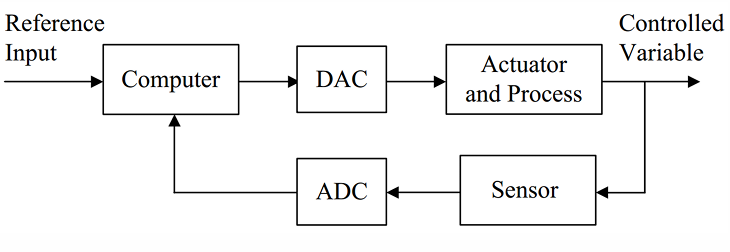
一个基本的数字系统如上图所示,其模拟输出的数字信号必须经过DAC转化为模拟信号交给模拟系统去执行,而反馈回来的模拟信号又必须通过ADC转化为数字信号以作为参考计算值。
DAC
有两种常用的DAC电路:
- R-2R 梯子(R-2R ladder)网络。
- 加权电阻器
R-2R ladder
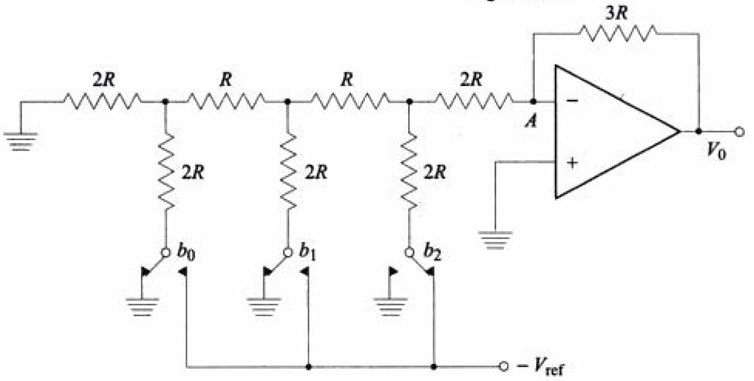
下图是一个3bits R-2R DAC的电路图。$b_1$是LSB,$b_2$是MSB。让我们分析一下这个电路。
(1)上图这样$b_2$接通的状态,
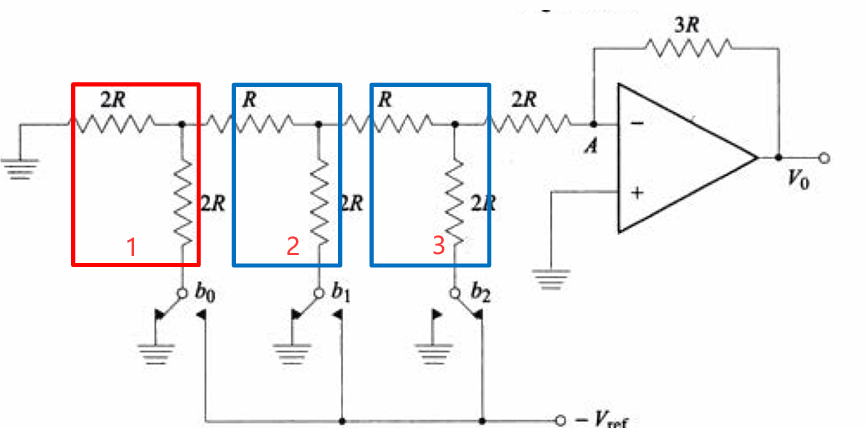
- 将电阻器件编为3组。如上图1,2,3三个环。
- 从最左侧第一组(环1)看起,水平的$2R$左侧接地,垂直的$2R$下面接地,因此以连接这两个$2R$的节点的视角来看,相当于两个等值对地并联电阻,因此在对节点来说它的等效电阻是$R$
- 现在看到中间这个环2,它的水平方向有个$R$连接到(2)中的节点,然后再经过(2)中等效的$R$地,因此其水平方向对地阻值是$2R$。其竖直方向又是$2R$接地,因此站在它的节点的视角来看,它也是2个$2R$并联接地,可以等效为$R$。
- 此时来到最后一组,水平方向的$R$和(3)中等效出来的$R$串联,阻值是$2R$。至此,电路等效成了这样:
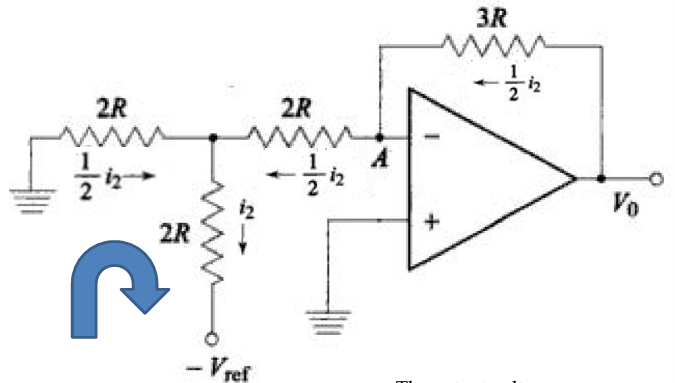
- 上图中A点因为虚短电压为0V,因此水平方向的左右两个$2R$又可以等效为$R$。
- 那么总电流就是$i_2=\frac{V_{ref}}{3R}$。同时水平方向的两个电阻均匀分流,因此流经运算放大器的电流是$\frac{1}{2}i_2=\frac{V_{ref}}{6R}$
- 运算放大器的放大电阻为$3R$,因此输出电压$V_0=3R\times\frac{V_{ref}}{6R}=\frac{1}{2}V_{ref}$
回顾一下将DAC的映射规则:MSB贡献最大值的一半,剩下的bit是距离MSB有n位就贡献$(\frac{1}{2})^{n+1}V_{ref}$。例如$010$就是$1/4\times V_{ref}$。$111$就是$\frac{1}{8}V_{ref}+\frac{1}{4}V_{ref}+\frac{1}{2}V_{ref}$
现在是MSB为$V_{ref}$,其他bit接地的情况。即$100_{B}$的情况,$V_0$应当等于$\frac{1}{2}V_{ref}$,分析出来的电压和DAC的映射规则符合。
(2)让我们来试想一下LSB($b_0$)接通,其他接地的状态。
- 从环3开始看起,环3节点右侧水平的$2R$和竖直的$2R$都位于接地的状态,因此等效为$R$
- 环$2$右侧水平的$R$和环3等效的$R$串联构成$2R$,并与竖直接地的$2R$等效成$R$
- 至此从环1节点的视角来看,左侧为$2R$接地,右侧为$2R$接地,竖直为$2R$接$-V_{ref}$,这个情况和MSB为1时的第五步一模一样。因此流过环3竖直$2R$的电流也为$i_2=\frac{V_{ref}}{3R}$,水平方向左右两侧分别分流$\frac{V_{ref}}{6R}$。
- 此时右侧的电流是流过运算放大器的,但是并非全部电流都经过运放的$3R$。当它经过环2时,站在环2的节点视角来看,水平为$2R$接地,竖直为$2R$接地,因此经过环2会被再次分走一半,只剩$\frac{V_{ref}}{12R}$。经过环1同理。如下图所示
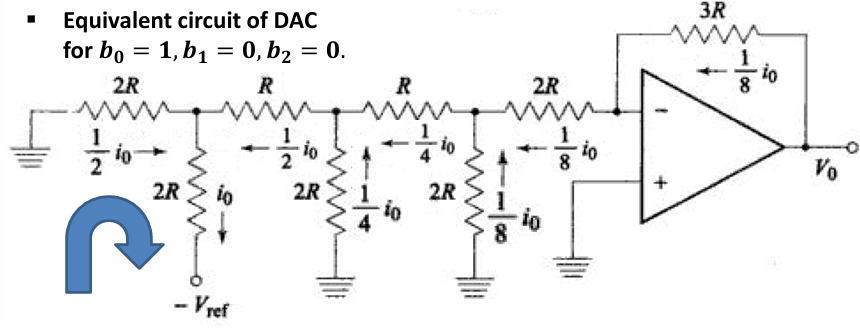
- 最终流向放大电阻$3R$的电流为$\frac{V_{ref}}{24R}$,因此$v_0=3R \frac{V_{ref}}{24R}=\frac{1}{8}V_{ref}$
- 总结一下我们发现,每经过1一个环,它的电流就变成了MSB电流的$1/2$,而距离MSB有n位就需要经过n个环,这恰好与DAC规则里面的“MSB贡献最大值的一半,剩下的bit是距离MSB有n位就贡献$(\frac{1}{2})^{n+1}V_{ref}$”对应上了。这就是这类DAC工作的原理
利用电流可叠加的特性,对每个bit接1的情况单独分析,即可发现$V_0$的输出是每个bit接地贡献电流的总和。至此这个DAC推导完毕。总结其通式为:
weighted resistors
下图是weighted resistor DAC的电路图。
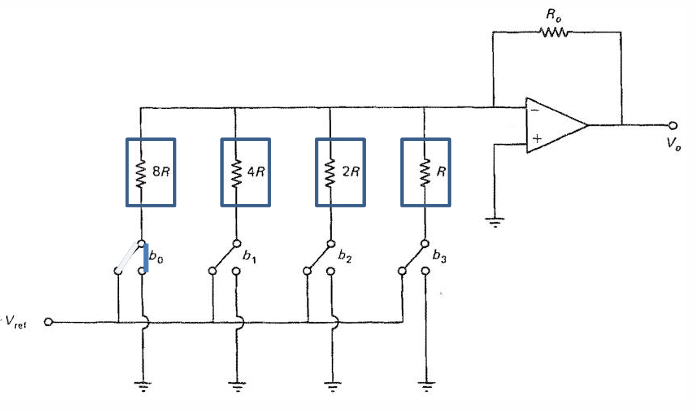
这类DAC的本质就是电子系统里面学过的反相加法器,通过不同的放大配置电阻来实现每个bit占不同的权重。这里省略推导。通式同上。
ADC-逐次逼近型ADC
这类ADC其实在计算机组成与接口一课中学过。这里简单回顾一下:
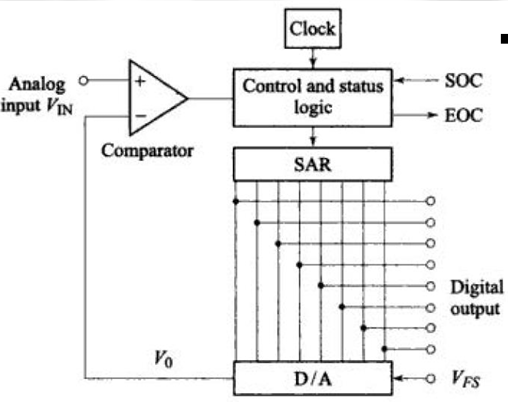
这类ADC由一个比较器,一个DAC,一个逼近寄存器(successive approximation register, SAR),一个时钟信号,一个产生控制信号的控制器(SOC:Start of Converting; EOC: End of Converting)构成。
- 一开始,SAR输出的值为0,DAC将其转换为模拟信号的0输出到$V_0$
- 比较器比较$V_{IN}$大还是$V_{0}$大,如果$V_{IN}$大,则将MSB置位1;再次比较
- 如果这次是$V_{0}$大,则将MSB回溯为0,MSB的后一位置为1;比较下一位
- 如果还是$V_{IN}$大,则将MSB的后一位置为1;比较下一位
- 重复这个过程,直到完成对最后一位的填写。
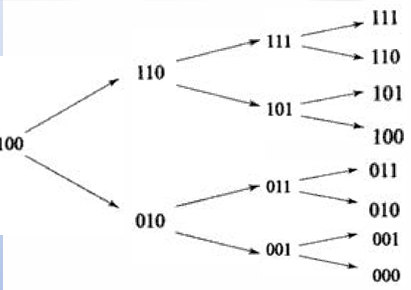
整个过程其实是一个二分法,如下图所示
这种ADC的采样时间通常在$10ns-200us$不等,并且要求$V_{IN}$在采样期间保持稳定。高性能的ADC系统包括一个S/H(采样保持)器件,该器件在转换期间保持ADC的输入恒定。
数字采样的混叠(Aliasing)问题
当ADC以一个较低的频率去对模拟信号采样时,可能会出现下图这样的问题,导致采得的频率远小于信号实际的频率,这被称为Aliasing。
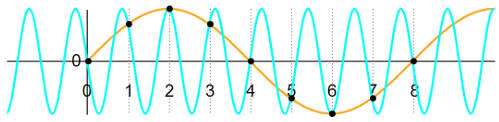
由于一个信号内会有不同的频率分量,因此有可能会有超出系统设计的高频频率分量因为Aliasing问题,在ADC采样后变成低频分量。为了解决这个问题,需要使用低通滤波器来滤除这些高频分量。在实际应用中这些被称为抗混叠滤波器(anti-alias filters)
当采样频率为最高频率2倍时(采样定理),原始信号才能完全被采样信号表达(无混叠问题)。
S域和Z域及其稳定性
S到Z的映射
s plane 到 z plane 的映射
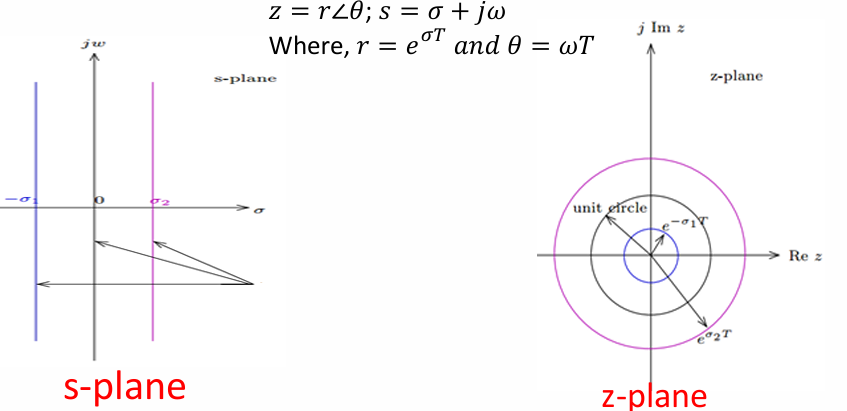
在信号与系统中学过,S域用于衡量连续系统,Z域用于衡量离散系统。其中S域到Z域的推导就是令$z=e^{Ts}$,其中$s=j\omega+\sigma$。分离一下这个z:
此时,这个复数z的幅值完全由$e^{T\sigma}$贡献,角度完全由$e^{jT\omega}$贡献。因此可以记为$z=r\angle\theta$,其中$r=e^{T\sigma}$,$\theta=\omega T$
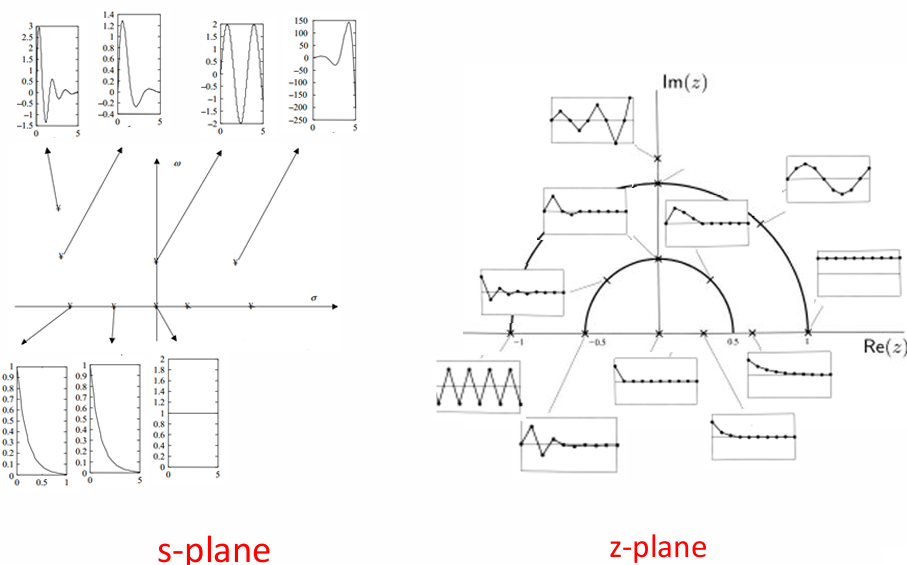
回想s平面,其横轴为$\sigma$,纵轴为$\omega$。现在到了z平面,原本的横轴映射为了幅值;原本的纵轴映射成了角度。原本位于横轴n处的一条垂直的线(即,$\sigma=n,\omega不限$)现在变成了幅值为n的一个圆(即,$r=e^{Tn},\theta=\omega T=不限$)。
因此s平面到z平面的映射,就是把它s平面上的竖线卷成一个圆;其中s平面左侧的因为$\sigma<0$,因此:
- $r=e^{\sigma T}<1$,在单位圆内。
- 位于虚轴上的$\sigma=0$,对应$r=1$,位于单位圆上。
- 位于右半平面的$\sigma>0$,映射到的就是$r>1$的单位圆外。
如下图所示
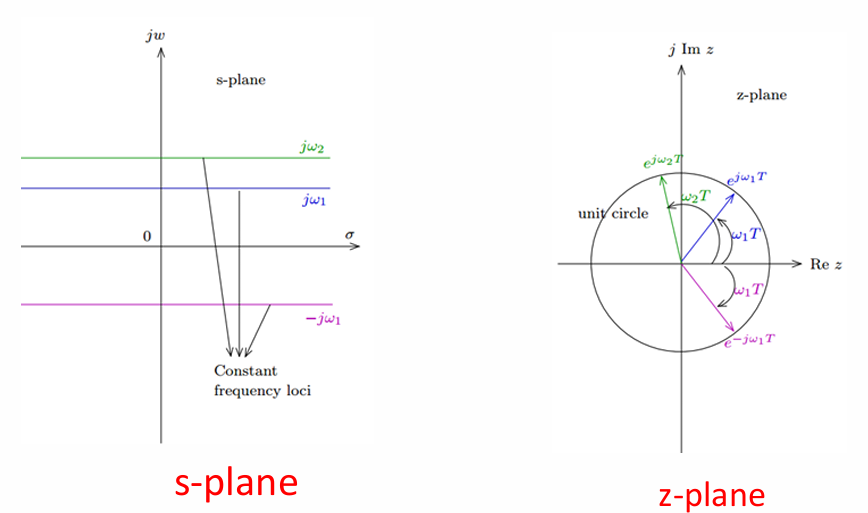
这样卷起来之后,原本在s平面水平的横线就被卷成了指向某一个方向的向量,如下图所示。从数学的角度也很好解释:某一条水平横线的表达式为$s=j\omega$,$\sigma$不限。映射到z就是$\theta=\omega T$,$r=e^{\sigma T}$不限。
终值定理和稳态误差转换
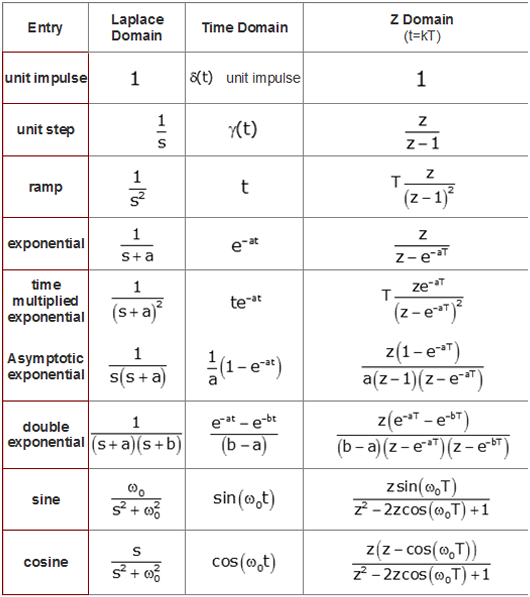
在Part1介绍的拉普拉斯变换中介绍了unit step, unit ramp, 和 acceleration input的steady state error。这里将它们映射到Z域(其实用映射不是很准确,除了终值定理遵循映射关系,它的公式其实是由z系统下表示的系统函数推导出来的)
单位阶跃响应
- 在s域下:$K_p=\lim_{s\rightarrow0}{G(s)H(s)}$,稳态误差:$e_{ss}=\frac{1}{1+K_p}$
- 在z域下:$K_p=\lim_{z\rightarrow1}{GH(z)}$,稳态误差:$e_{ss}=\frac{1}{1+K_p}$
type0系统稳态误差存在,1阶及以上不存在。注意这里的type还是由分母孤立的s来定义,并非z。
单位斜坡响应
- 在s域下:$K_V=\lim_{s\rightarrow0}{sG(s)H(s)}$,稳态误差:$e_{ss}=\frac{1}{K_V}$
- 在z域下:$K_V=\lim_{z\rightarrow1}{\frac{(1-z^{-1})GH(z)}{T}}$,稳态误差:$e_{ss}=\frac{1}{K_V}$
type0系统稳态误差为无穷,type1为$\frac{1}{K_V}$,type2及以上无稳态误差
单位加速度响应
- 在s域下:$K_a=\lim_{s\rightarrow0}{s^2G(s)H(s)}$,稳态误差:$e_{ss}=\frac{1}{K_a}$
- 在z域下:$K_a=\lim_{z\rightarrow1}{\frac{(1-z^{-1})^2GH(z)}{T^2}}$,稳态误差:$e_{ss}=\frac{1}{K_a}$
type0,1稳态误差为无穷,type2为$\frac{1}{K_a}$
s域的极点和时域响应的关系
实数根和收敛速度的关系
考虑一个系统:$G(s)=\frac{1}{s+a}$,这个系统的极点为$s=-a$,对单位冲击函数$\delta(t)$的响应就是传递函数本身,即$U(s)=\frac{1}{s+a}$,那么有:
如果a为正数,即极点在左边平面,这个响应呈现随时间衰减趋势,且a越大衰减越快;如果a为负数,即极点在右半平面,这个响应呈现随时间增加趋势,且a越小递增越快。
对应极点,就是极点越靠近负无穷,衰减越快,极点越靠近正无穷,增加越快,极点在0附近这个函数更趋于平缓
主导极点
考虑一个二阶系统$G(s)=\frac{1}{s^2+2\zeta\omega_ns+\omega_n^2}$,对其施加单位冲击响应,输出为系统函数本身。系统函数的极点可令分母等于0后使用求根公式获得:
当$\zeta>1$时:
$\sqrt{\zeta^2-1}>0$,$P_1,P_2$都为实数。输出可以写成:
假设两个极点都在右半平面。由于$P_1=-\zeta\omega_n+\omega_n\sqrt{\zeta^2-1}>P_2=-\zeta\omega_n-\omega_n\sqrt{\zeta^2-1}$,遵照上面将的离负无穷越近收敛越快,$P_1$这收敛较慢,$P_2$收敛较快。系统由这两部分叠加,收敛较慢的信号决定了系统的收敛速度,因此称$P_1$为主导极点。(此时也对应了严阻尼,无过冲收敛的情况)
虚部根于震荡频率的关系
继续考虑前面的二阶系统,当$\zeta$=0时
此时这两个根完全在虚轴上,无实部分量。系统输出为:
可以看到,此时系统输出以$\omega_n$的频率进行震荡,且$|\omega_n|$越大震荡的频率越快。因此,极点在虚轴上距离零点越远,震荡频率越快(此时也对应了无阻尼,自由震荡的情况)
结合实部和虚部的关系
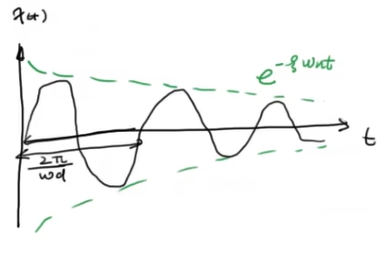
继续考虑前面的二阶系统,当0<$\zeta$<1时
定义$\omega_d=\omega_n\sqrt{1-\zeta^2}$,称为固有频率,此时:
其图像是包络为$e^{-\zeta\omega_nt}$,以$\omega_d$为频率震荡收敛的函数。因此根的虚部大小($\omega_d$)决定了其震荡频率,实部大小($-\zeta\omega_n$)决定了其收敛速度。(对应欠阻尼情况)。
总结和映射至Z平面
总结一下,在s域内:
- 极点虚部绝对值越大信号的震荡频率越快
- 极点实部在左半平面,信号收敛;越靠近负无穷收敛越快
- 极点实部在右半平面,信号发散;约靠近正无穷发散越快
- 极点无实部只有虚部时,为临界稳定状态,保持固有频率震荡
考虑s平面和z平面的映射关系,在z域内:
- 极点相位角越大震荡频率越快
- 极点模长小于1时,信号收敛;越靠近0收敛越快
- 极点模长大于1时,信号发散;越靠近无穷发散越快
- 极点模长等于1时,为临界稳定状态,保持固有频率震荡
最终可以得到下图:
s域和z域稳定性关系
在上一节的分析中可以得出:
- s域所有极点在左半平面系统稳定;z域所有极点在单位圆内系统稳定
- s域有极点在虚轴上系统临界稳定;z域所有极点在单位圆上系统临界稳定
- s域所有极点在右半平面系统不稳定;z域所有极点在单位圆外系统不稳定
Z域下的稳定性判据
同前面介绍Routh-Hurwitz稳定性判据时一样,对于低阶系统,我们可以轻易得求得其零极点。但是对于高阶系统这比较困难。因此需要稳定性判据。前面介绍过的s域下的Routh-Hurwitz稳定性判据,这里会介绍 Jury’s Stability test 和 Bilinear transformation 映射到z域下的Routh-Hurwitz稳定性判据
Jury’s Stability test
类似于 Routh - Hurwitz 方法,Jury’s Stability test 也是一个基于数理的稳定性测试。它用于确定多项式的根是否位于单位圆内。
考虑以下形式的传输函数特征方程:($a_0>0$)
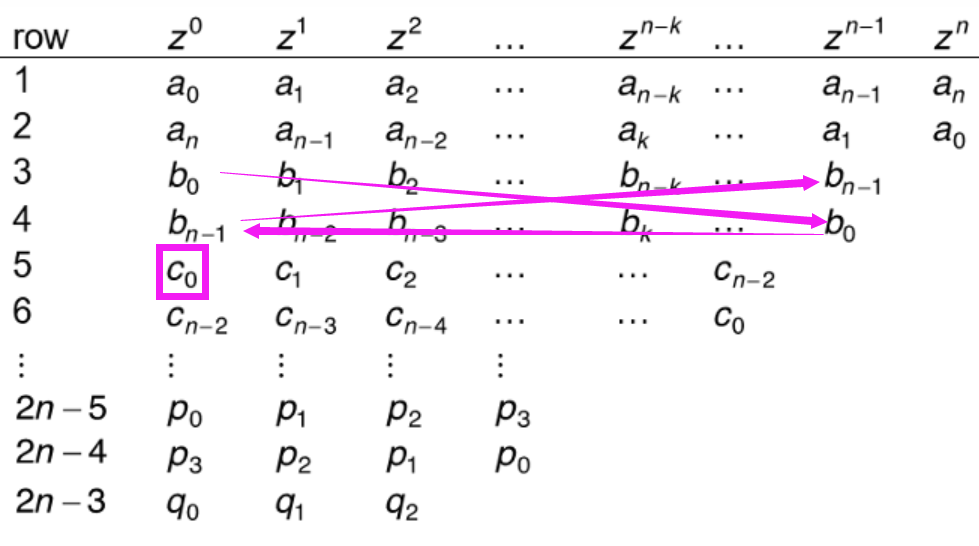
与Routh-Hurwitz稳定性判据类似,Jury’s Stability test 也有一张表,需要使用的行数由特征方程的最高阶决定:$行数=2n-3$。例如假设最高是$z^4$,则需要5行。
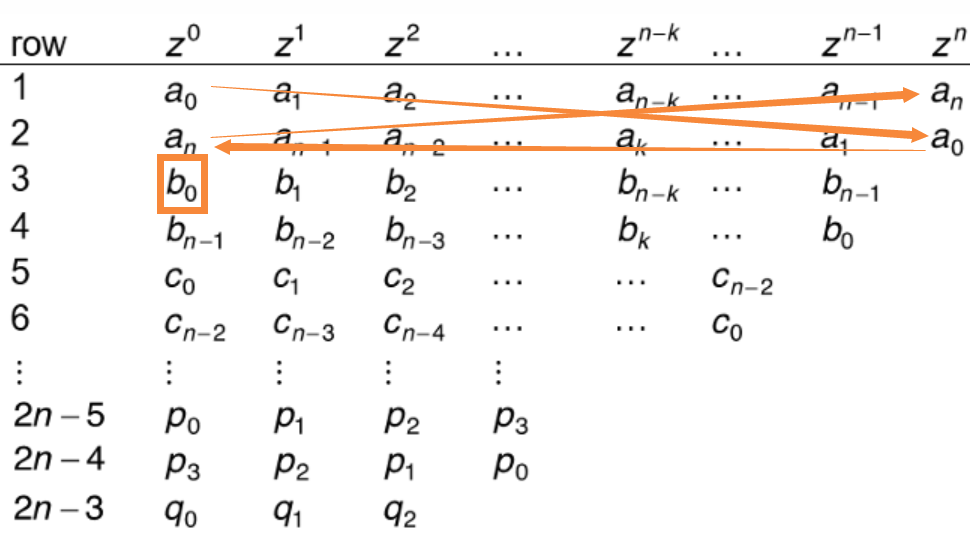
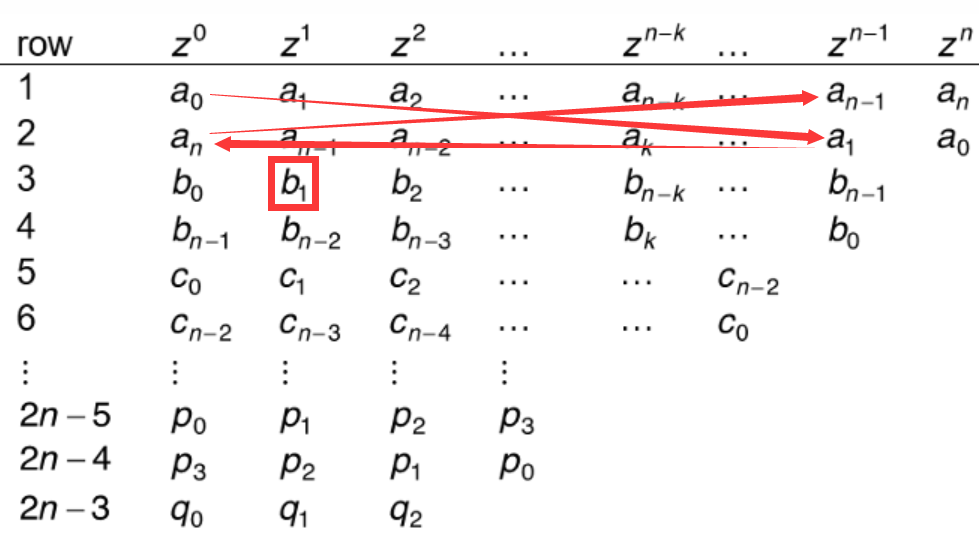
- 表中第一行以逆序和顺序的方式写上系统特征方程的系数。
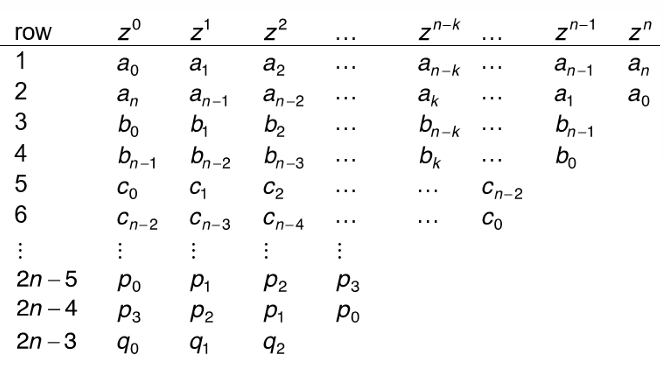
- $b_k,c_k$的计算方法为:
如下面三图所示
如果满足以下条件则系统稳定
- $F(1)>0$
- $(-1)^nF(-1)>0$
- $|a_0|<a_n$
- $|b_0|>|b_{n-1}|,|c_0|>|c_{n-2}|…$直到最后一个
举个例子:$F(z)=z^4-1.2Z^3+0.07z^2+0.3z-0.08$
step1 先对$F(1)$和$(-1)^nF(-1)>0$进行判断:
step2 再对$|a_0|<a_n$进行判断:
step3 最后再计算表格,对$|b_0|>|b_{n-1}|,|c_0|>|c_{n-2}|…$进行判断。Z有4阶,因此需要$2\times4-3=5$,因此使用5行。
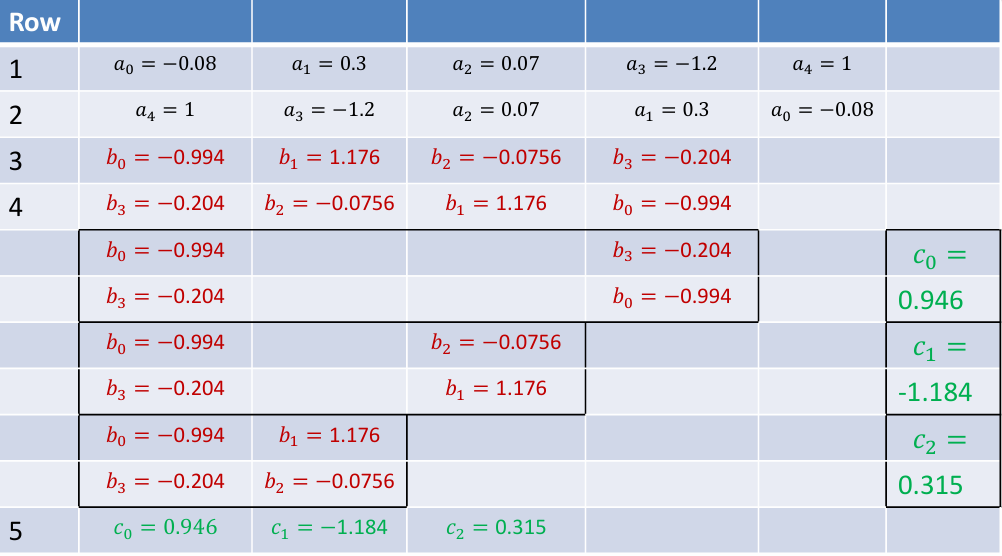
最后发现
因此系统稳定。
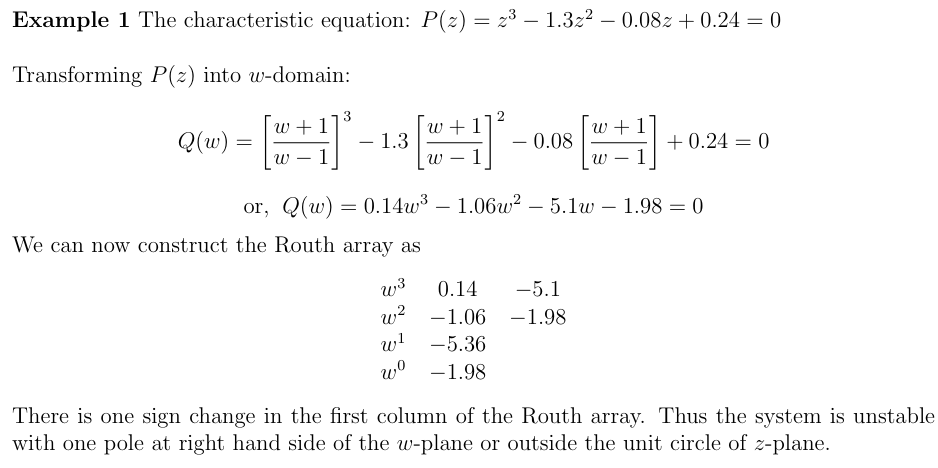
bilinear transformation coupled with the Routh stability criterion
Part1的Routh stability criterion只适用于s域,但是现在需要讨论离散的z域。这里的方法是使用 bilinear transformation 将z域映射回s域(它这里记作$w$域):
映射回去之后,对$w$套用Routh-Hurwitz准则
举个例子:
采样后的数字控制系统
简单回顾:Z变换
抽头形式
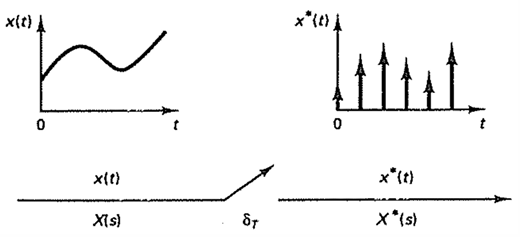
在时域的一个信号,经过脉冲抽样器采样之后会变成下图右侧的样子。其数学表示为
这个式子的z变换为:
其中$T$为采样周期,$z^{-k}$就是延迟器(Recall:数字信号处理)
S变换-时域-Z变换间的关系
以时域作为媒介,可以使用上述变化对直接对s域到z域进行变换。
引入-冲击采样的传输系统
引入-采样输入,采样输出
考虑这样的一个系统:
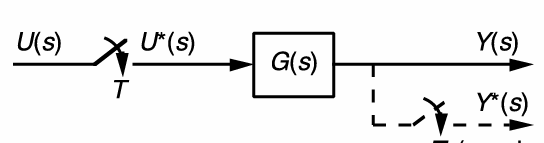
在模拟情况下:
如果将$U(s)$采样为$U^*(s)$,则是:
如果对输出的$Y(s)$也进行采样为$Y^*(s)$,则可以看成两个离散序列卷积,是:
相当于对模拟系统离散化后,再和离散化的信号卷积。模拟信号离散化可以表示为z变换:
其中$g(kT)$是对模拟信号的单位冲击响应的采样序列。因此:
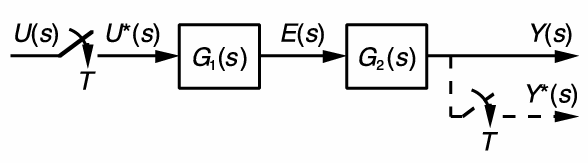
采样输入,采样传递,采样输出
再考虑这样一个系统:
根据引入里面的结论,这个系统的表达式可以写为:
传递函数为:
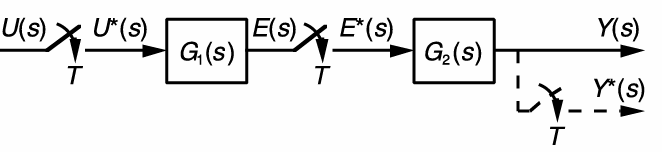
采样输入,模拟传递,采样输出
那么对于这个系统:
首先对$U(s)$进行采样,输入系统$G_1(s)$,有:
$E(s)$会以模拟信号的形式输入$G_2(s)$,有:
对$Y(s)$进行采样,有:
因此传递函数为
注意!$G_1G_2(z)\neq G_1(z)G_2(z)$
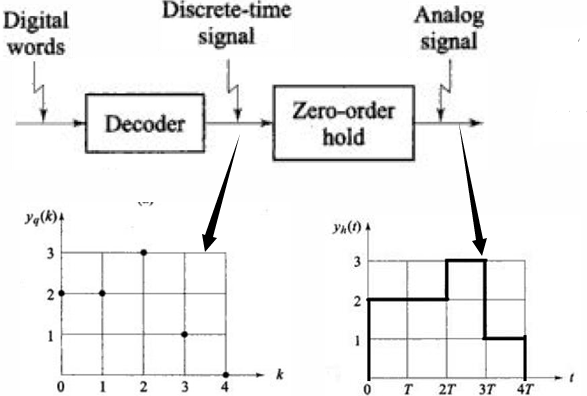
使用0阶保持器(Zero-Order Hold,ZOH)将数字信号输入模拟系统
ZOH的系统函数
ZOH可以将离散的数字信号保持一段时间,使其可以输入模拟系统。如下图所示
假设ZOH的保持时间为T,那么其对单位冲激函数的输入会保持T的时间,可以写成时移的两个u(t)相减:
因为单位冲激函数的响应恰好就是系统函数,因此ZOH的函数就是:
将ZOH输入模拟系统
将ZOH进入模拟系统$G(s)$后的输出记为$G_{ZA}(s)$
如果将$G_{ZA}(s)$的输出离散采样,回顾一下,时域时移性质在Z变换下和S变换下的表达式:
因此我们可以得到:$Z[f(s)e^{-kTs}]=z^{-k}Z[F(s)]]$。所以上式可以写为:
至此我们得到了ZOH输入模拟系统,再对输出采样的结果。这里的$Z[\frac{G(s)}{s}]$需参照上面S变换-时域-Z变换间的关系的表格,直接使用s变换对映射到z变换对来进行变换。
总结一下:
采样周期与系统稳定性的关系
考虑如下这个系统
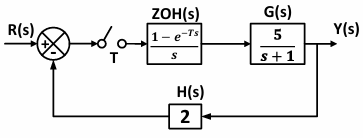
系统传递函数为$G_{ZA}(z)$,根据上面总结的公式:
由变换对$\frac{1}{s(s+a)}=\frac{1}{a}(1-e^{-at})=\frac{z(1-e^{-aT})}{a(z-1)(z-e^{-aT})}$可以算得:
其中T为采样周期
系统的$OLTF(s)=H(s)ZOH(s)G(s)$,$OLTF(z)=2G_{ZA}(z)$,因此:
系统的$CLTF(z)=\frac{G_{ZA(z)}}{1+OLTF(z)}$
系统特征方程为:$z-11e^{-T}+10=0$,系统极点为$z=11e^{-T}-10$。对于z域,要求所有极点模长小于1,系统稳定,即:
因此,求得若要系统稳定,采样周期必须$0<T<0.2$。那么最小采样频率(称为critical frequency)必须大于$f_{critical-frequency}=\frac{1}{T_{max}}=5Hz$,采样频率等于最小采样频率时,系统临界稳定。